“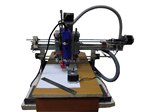
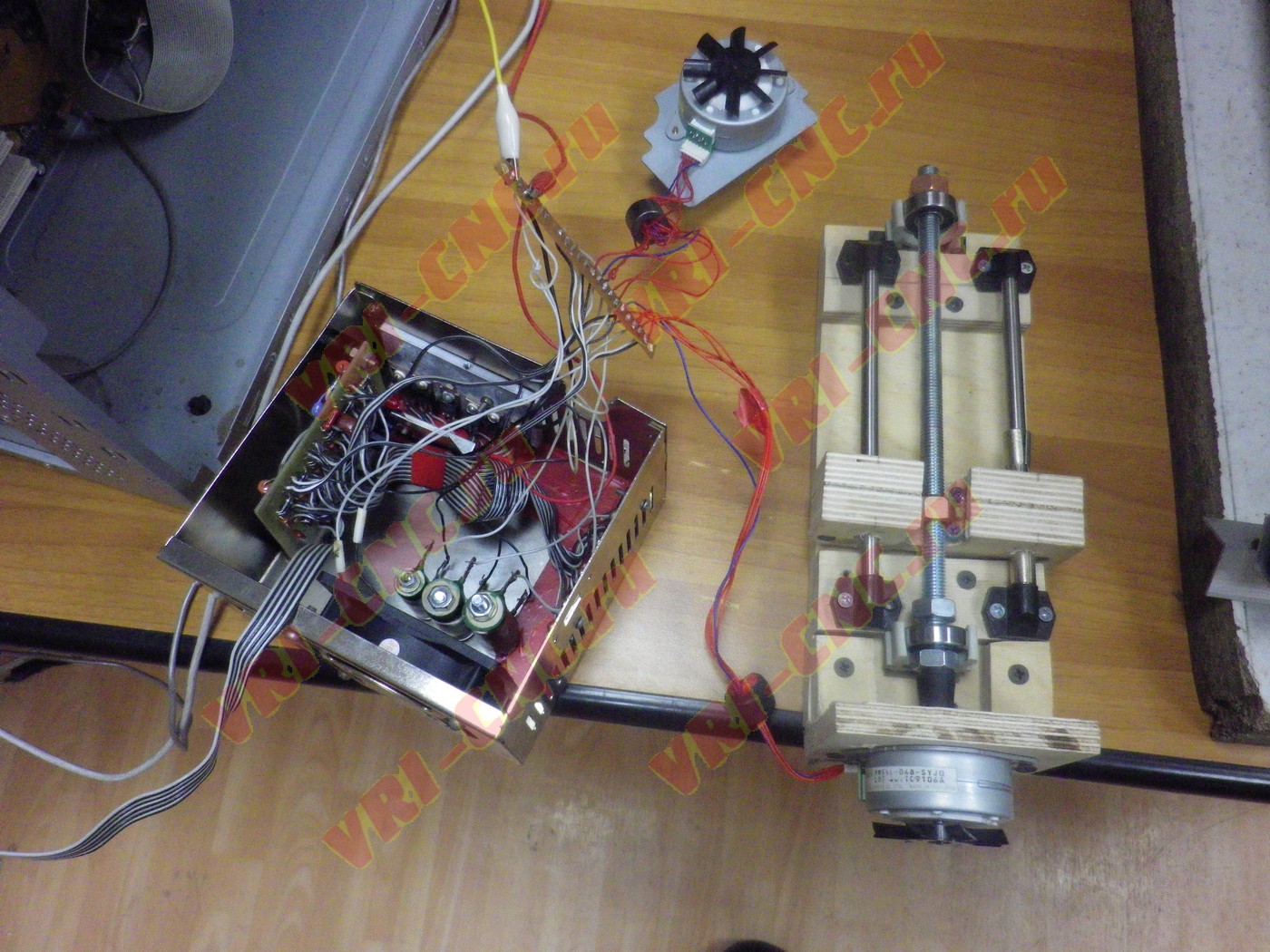
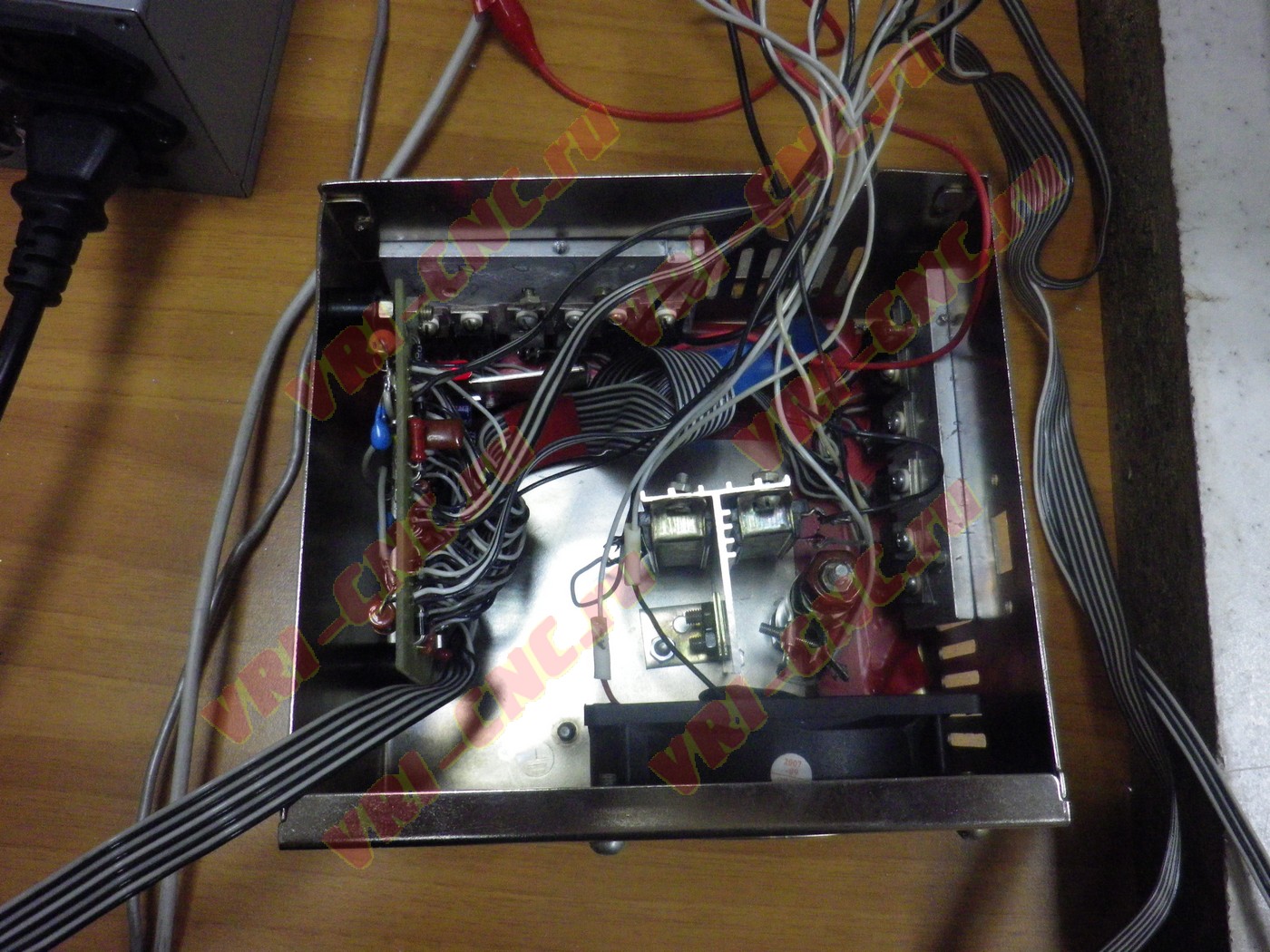
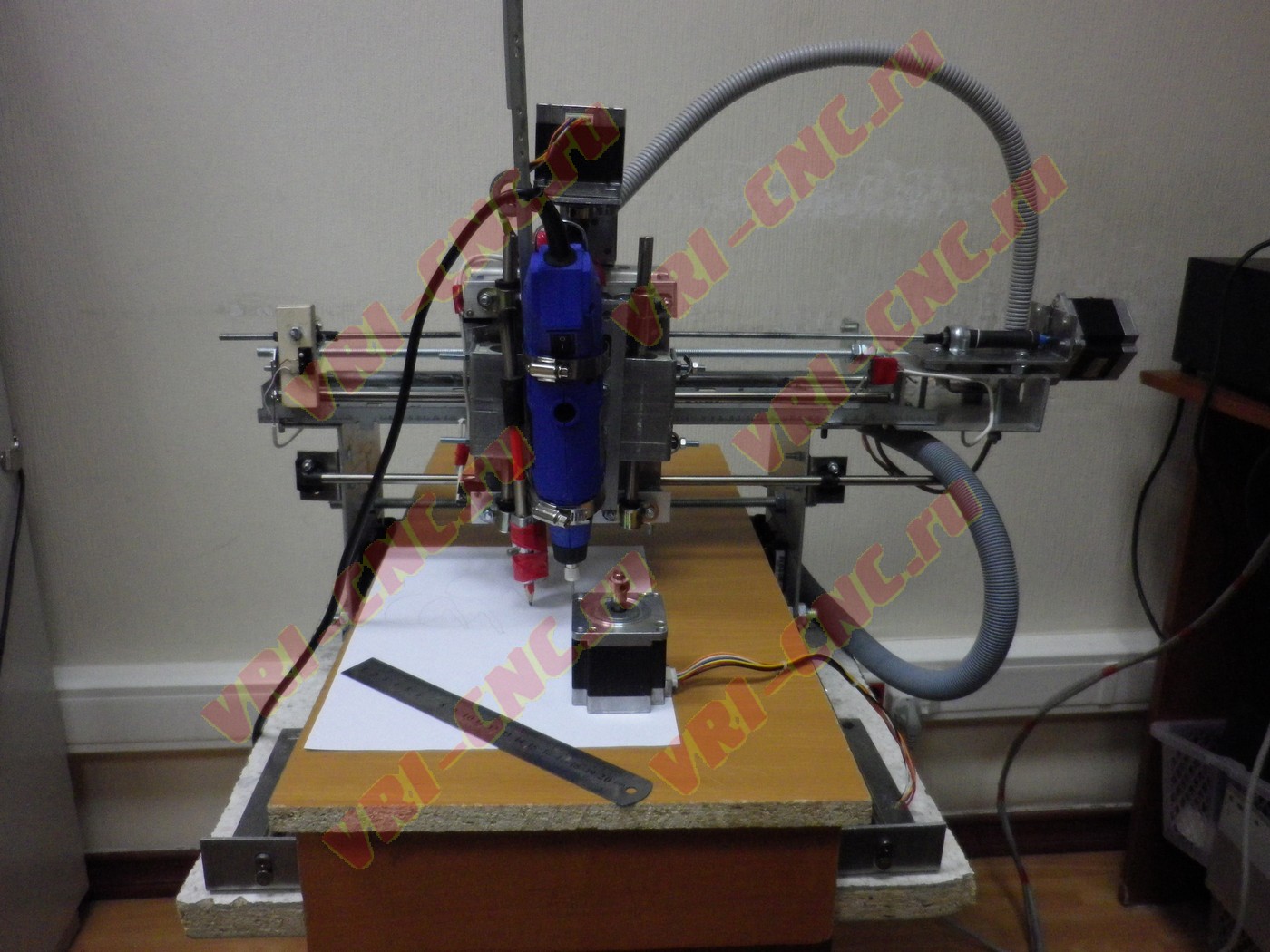
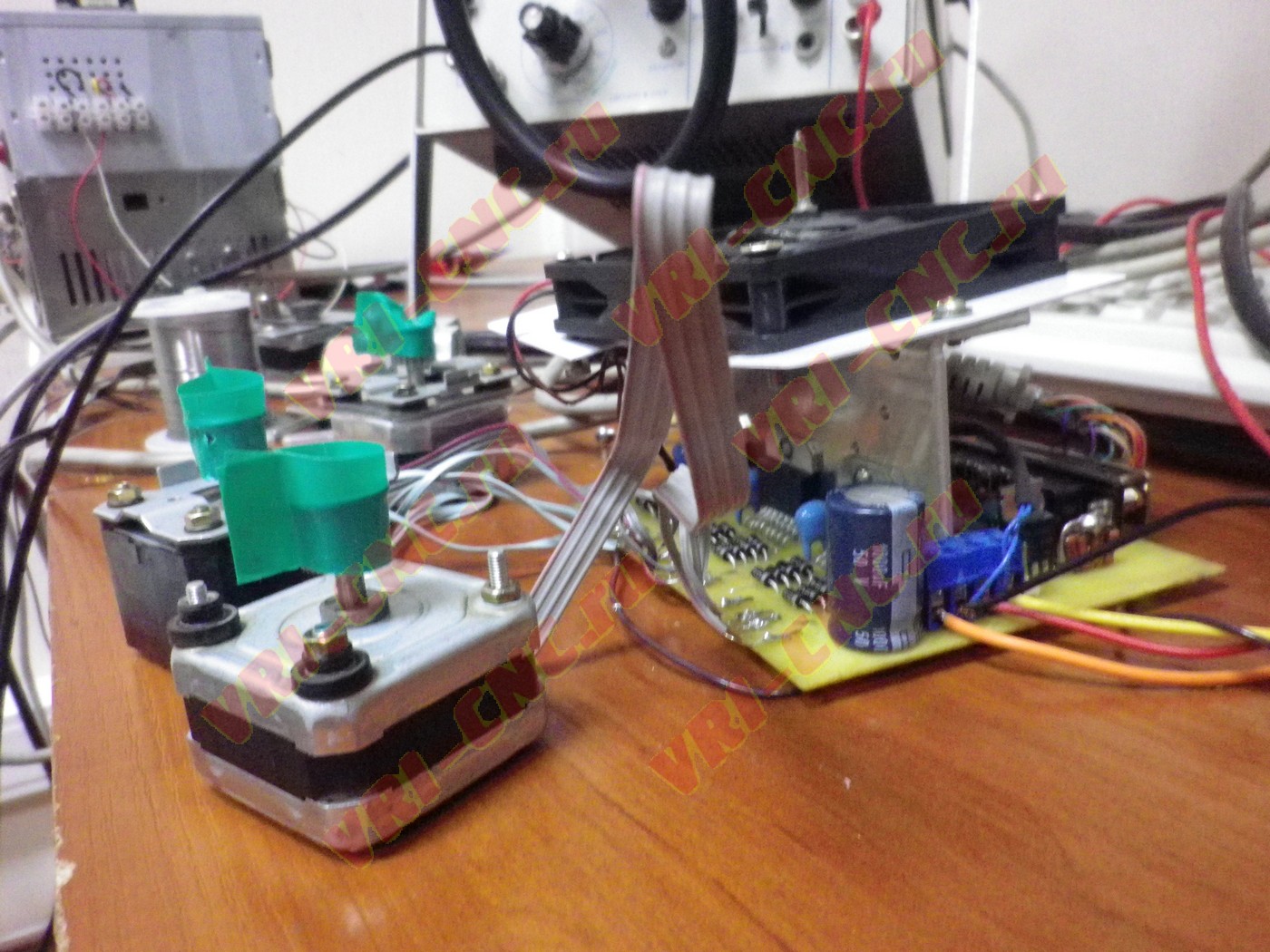
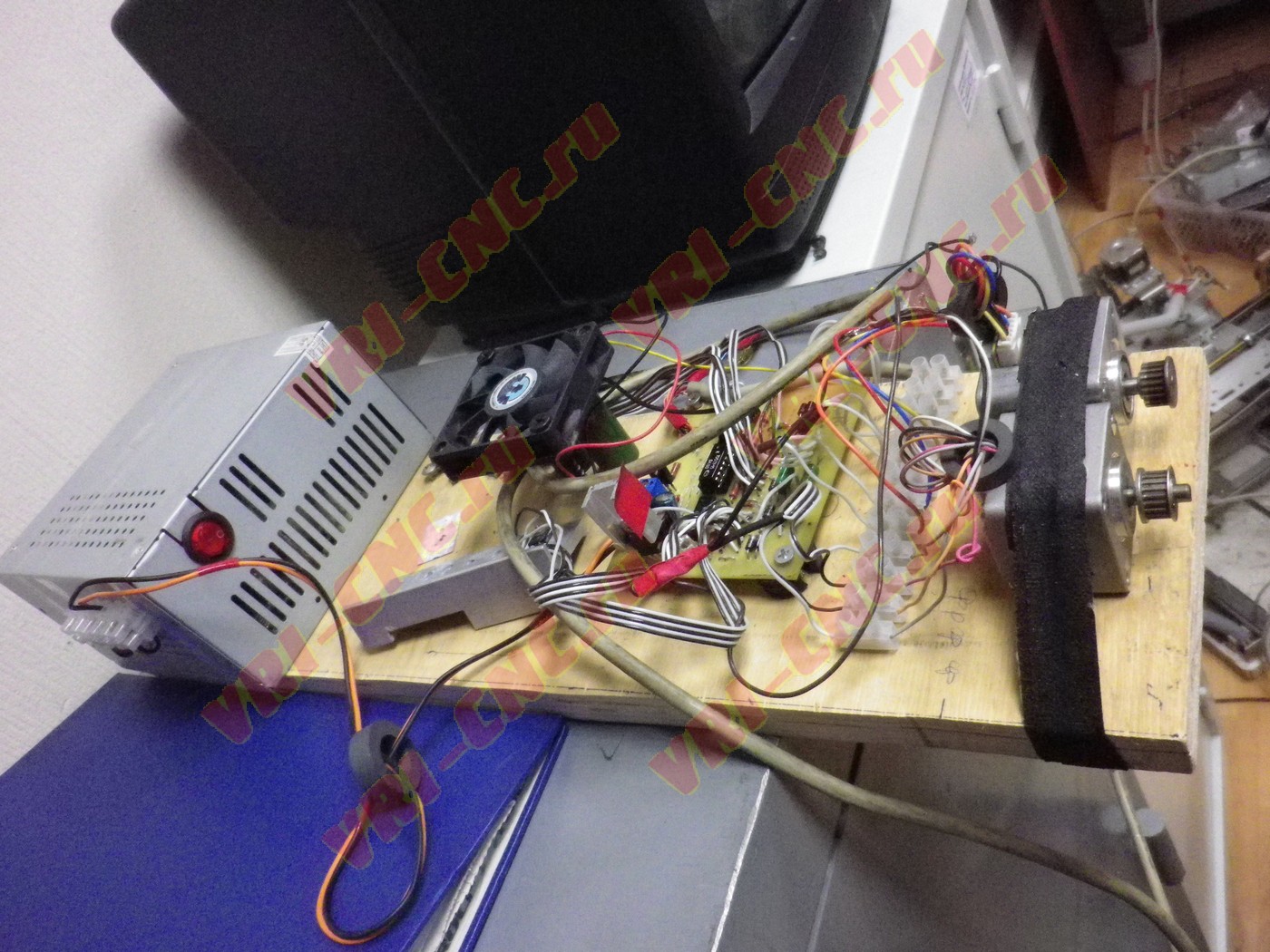
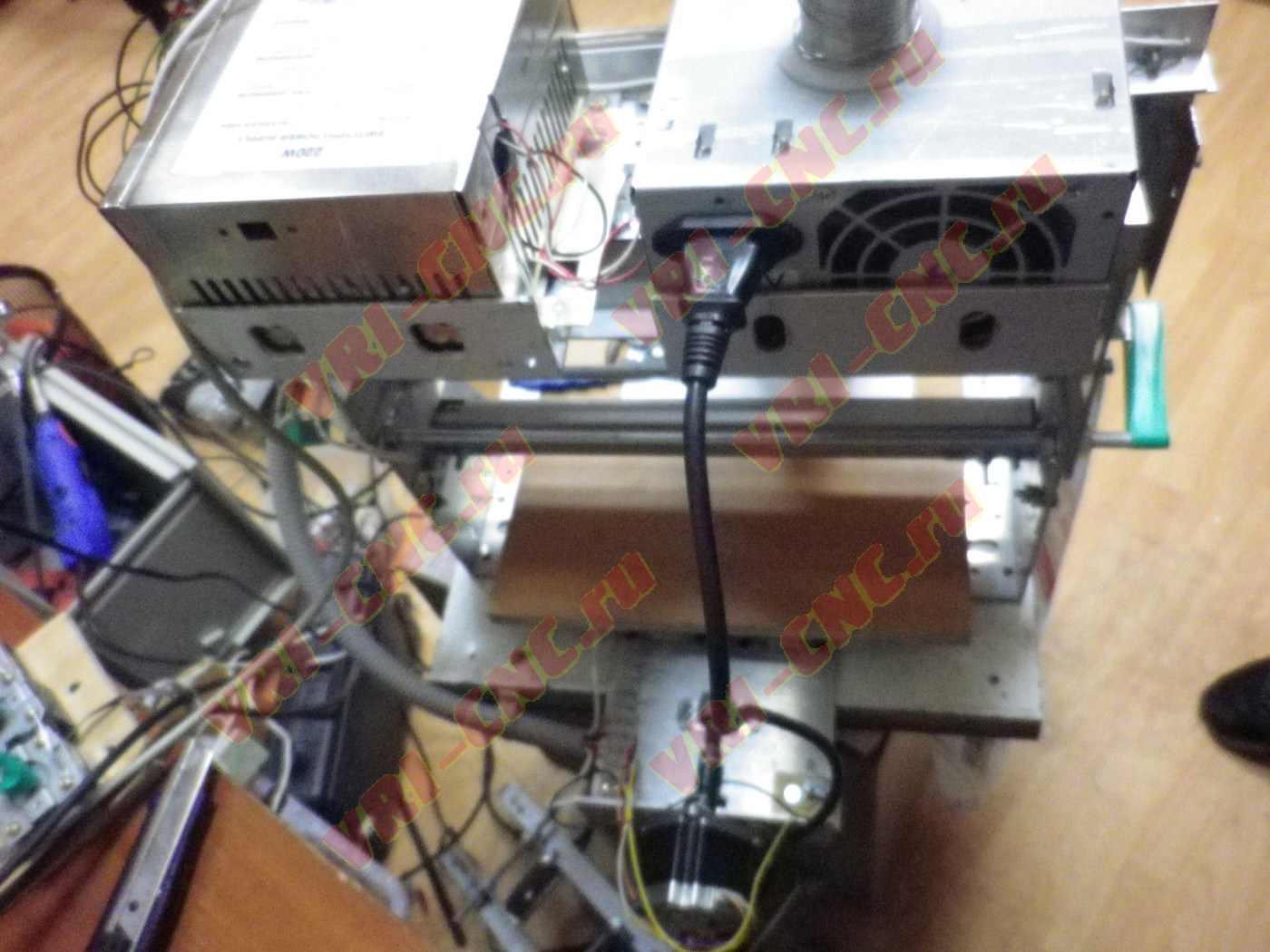
Рама металлическая, достаточной жесткости, контроллер и БП разместил сверху. .Шпилька 6 мм.
Моторы униполярные производства Тайланд. Направляющие использовал от разборных принтеров.
“
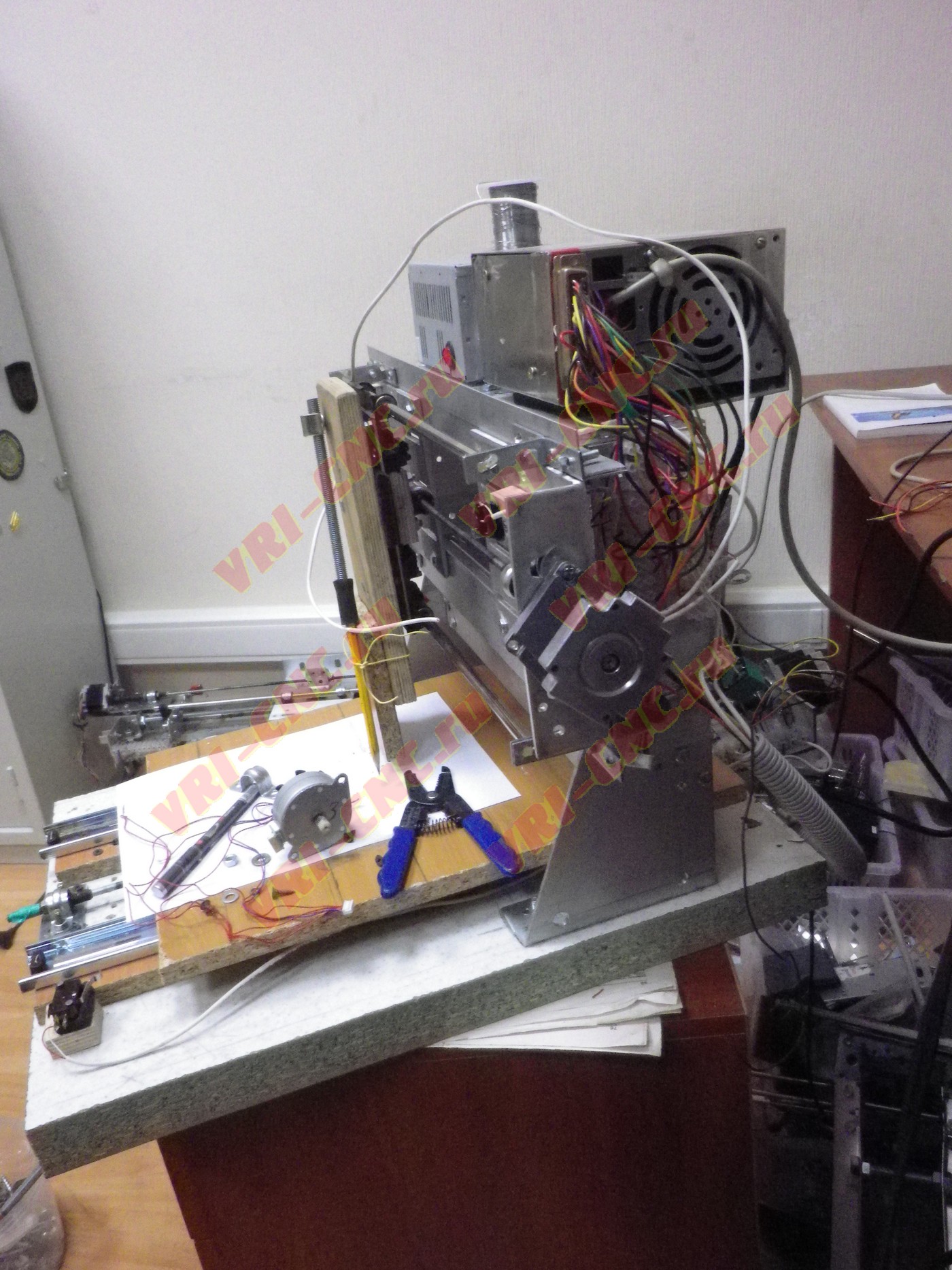
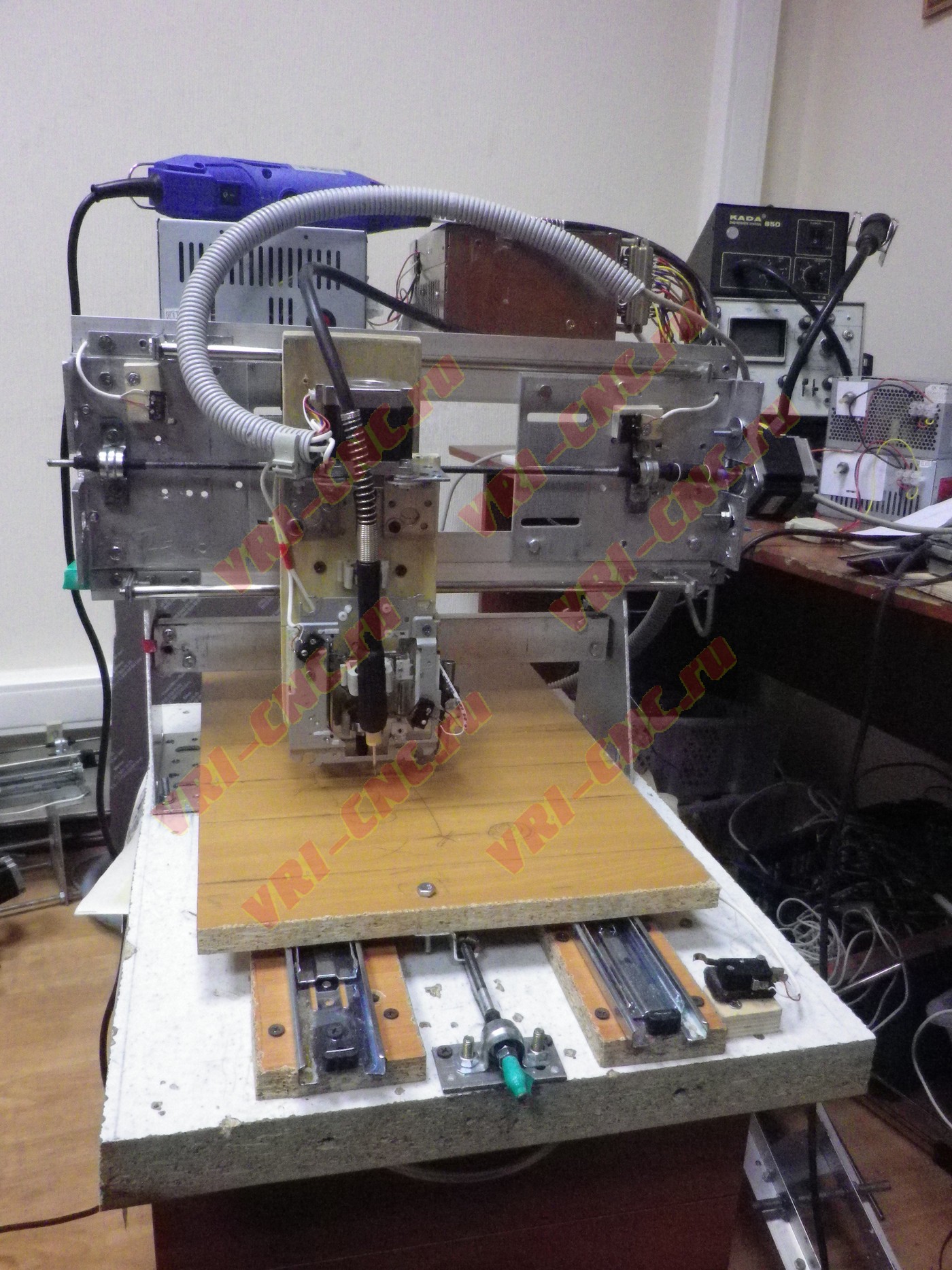
” Дюраль алюминиевые пластины, уголки, подшипники приобретал в свободной продаже на местном рынке.
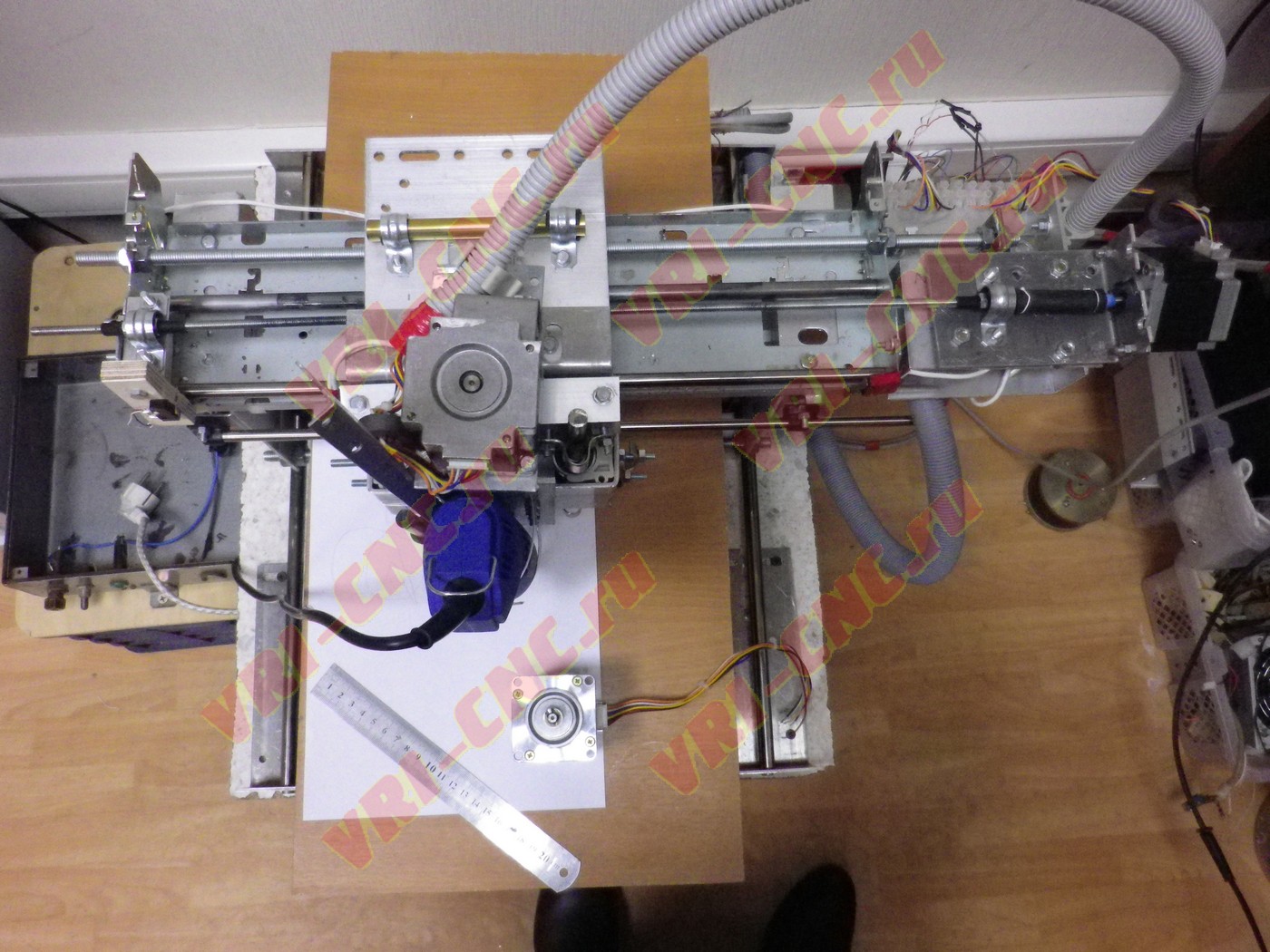
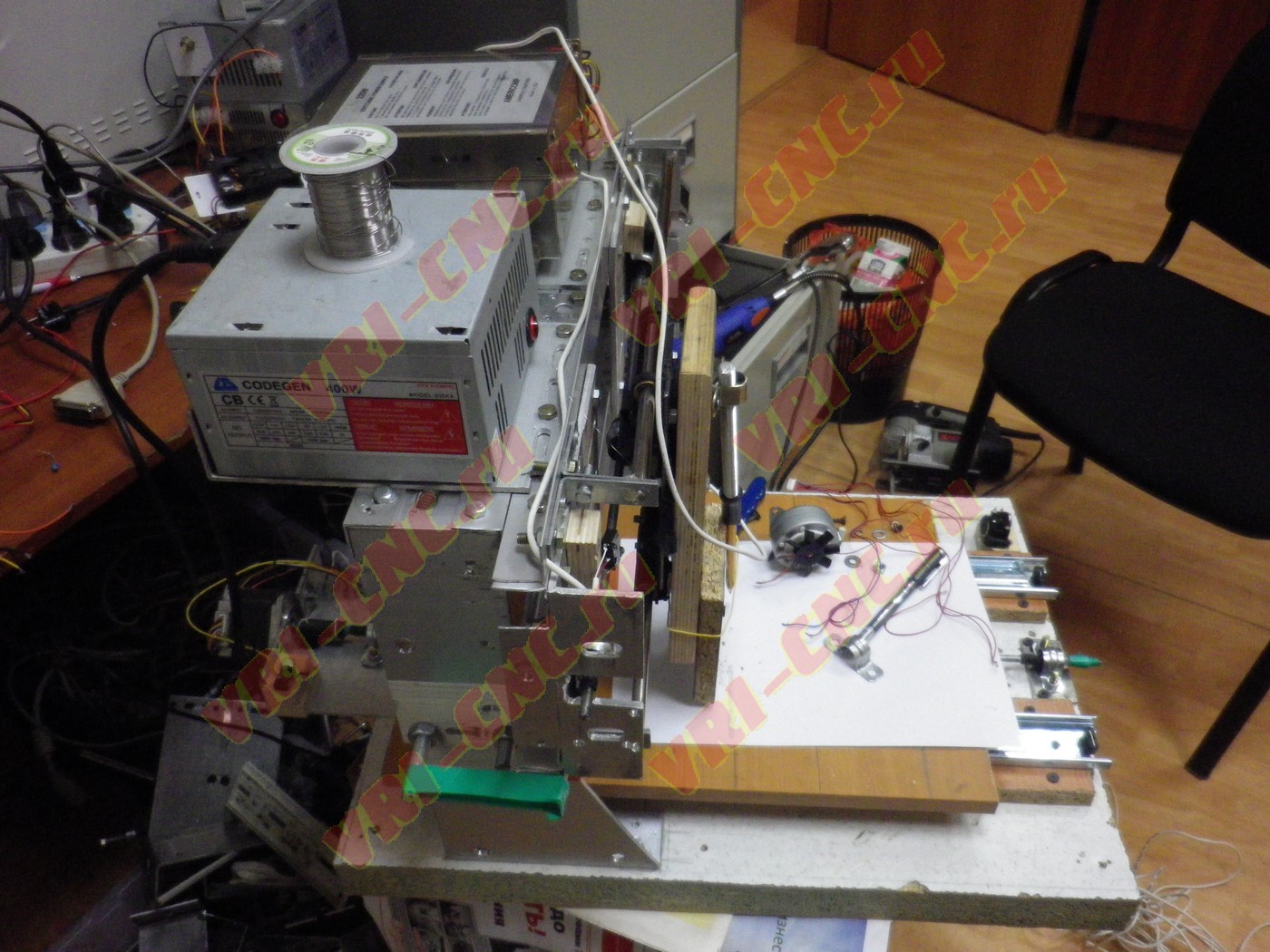
Рабочий стол подвижной. Агрегат работает карандашом и бор-шлангом с фрезой на бумаге и мягком металле соответственно, пока в 2 D.
Круг рисует идеально, возврат в ноль удовлетворительный.
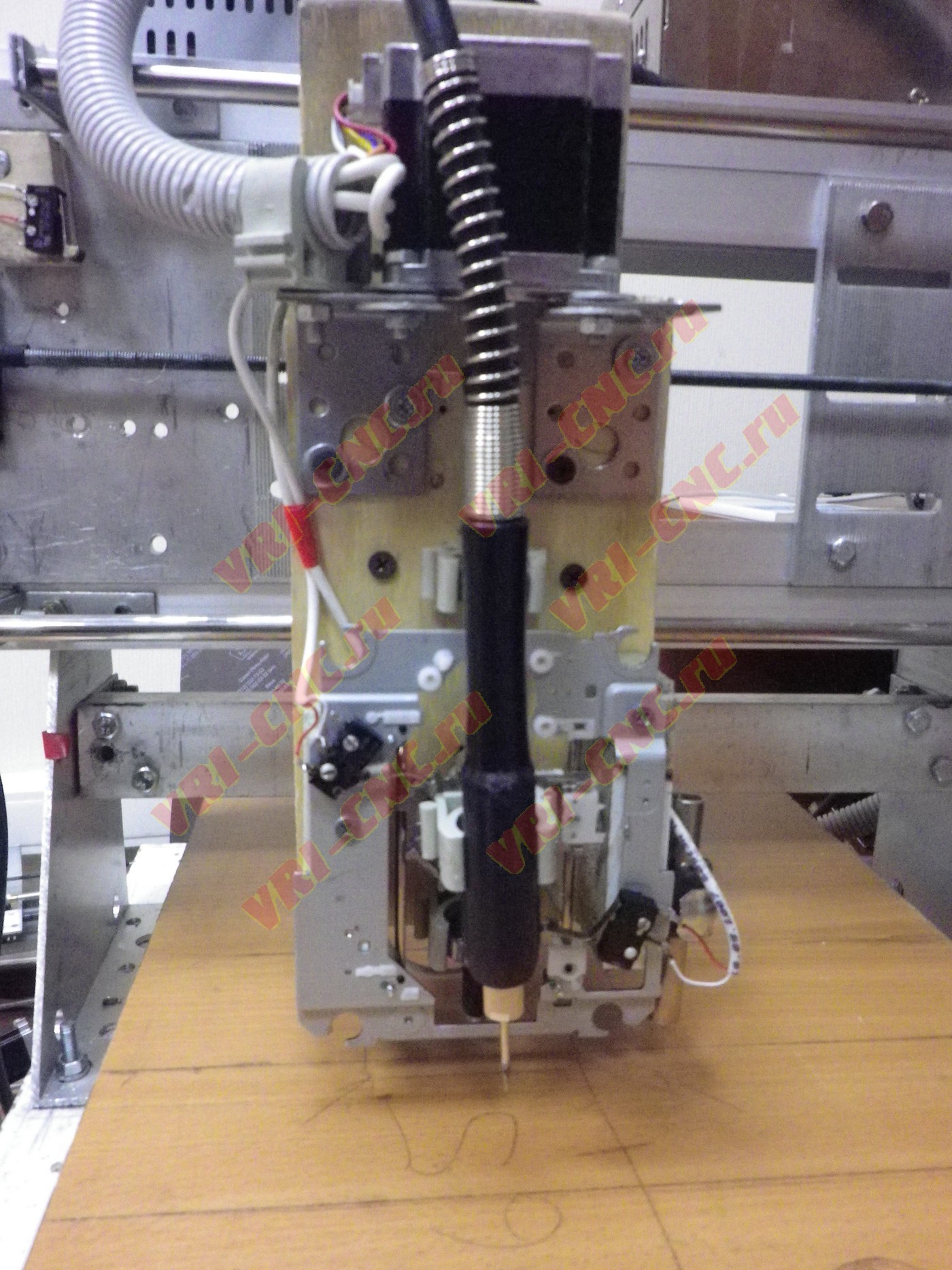
Прорисовка букв высотой в 6 мм по контуру на металле разборчивая. Ось Z пока временная, требует доработки.
Бор-шланг использовал для снижения давления массы на каретки осей X и Z.
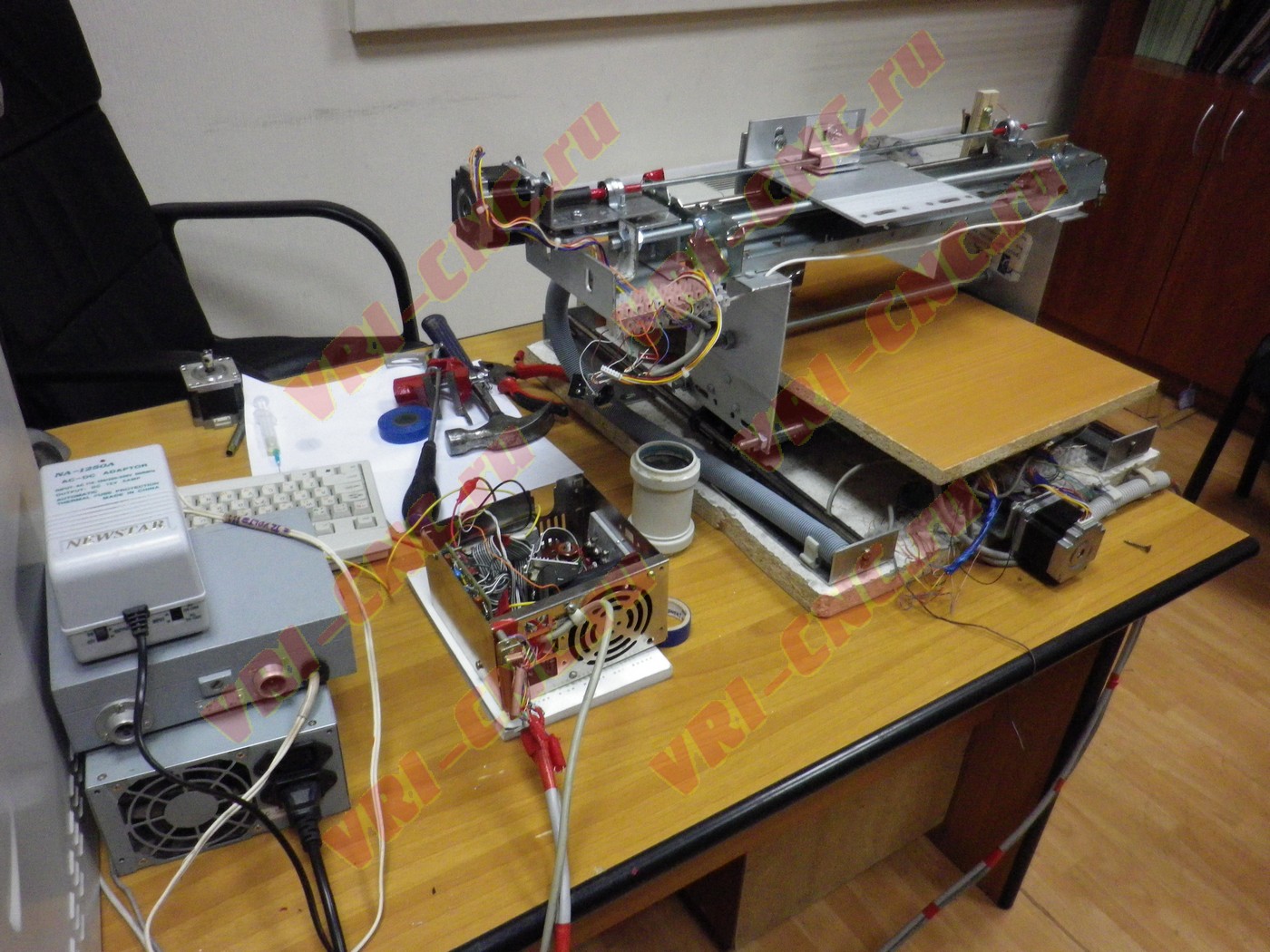
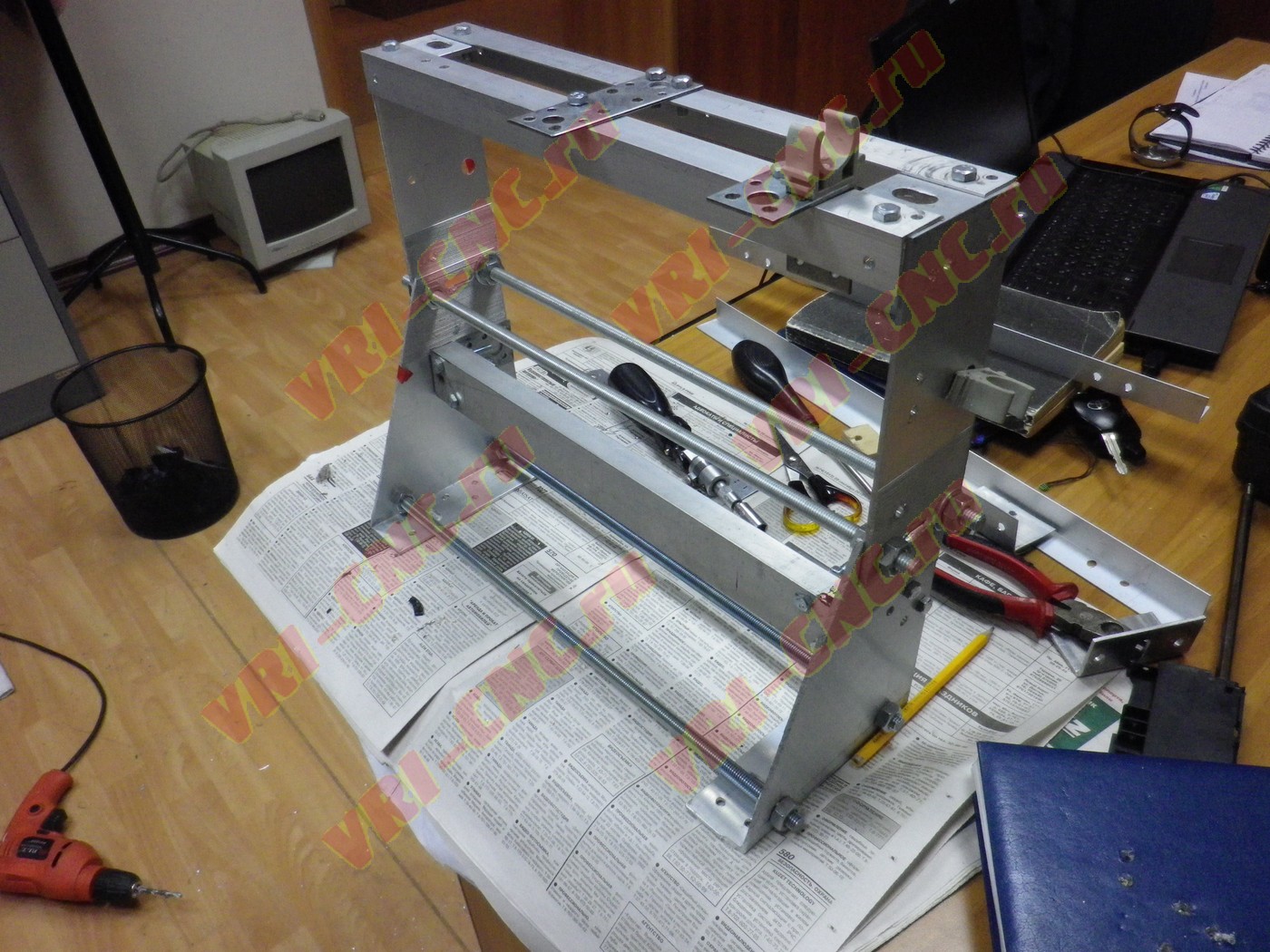
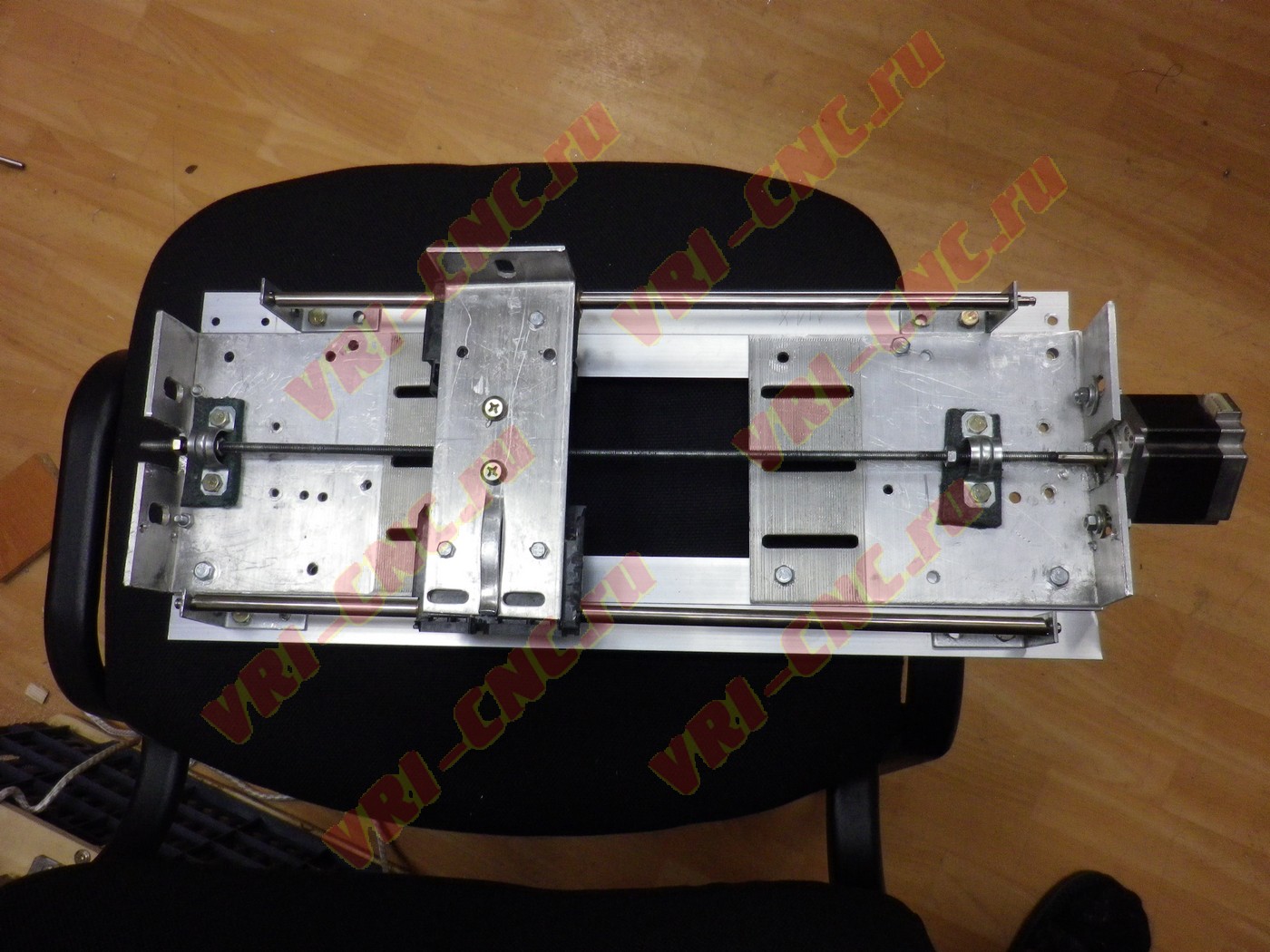
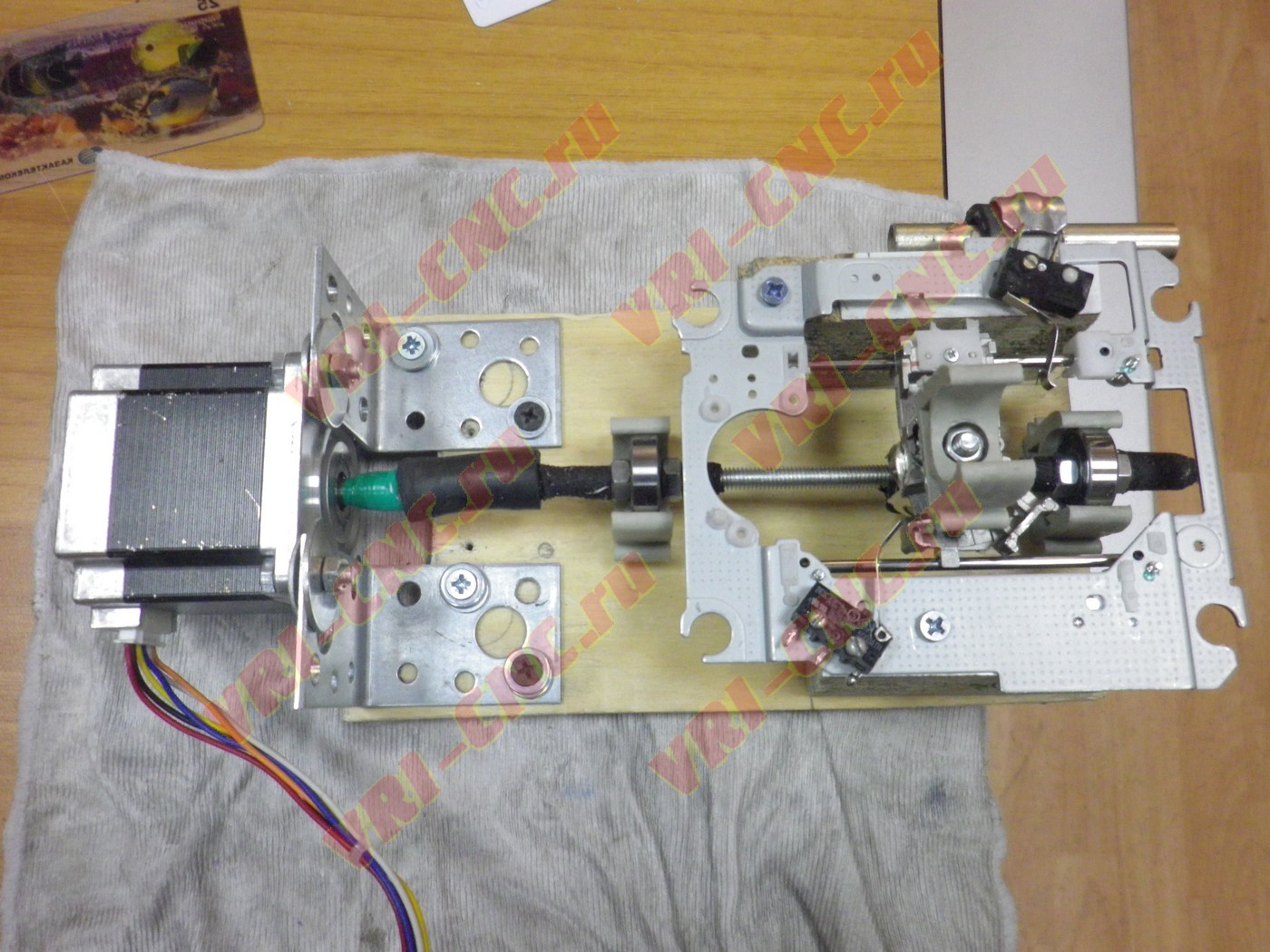
В процессе работы изготовил 2 варианта станков с подвижной рамой осей Х, Z.
на рельсах с подшипниками и направляющих от принтера (фото прилагается) .
От этой схемы отказался, поскольку отмечалось давление массы рамы на направляющие от Z,
перекосы хода по рельсам, проблемы с фиксацией рамы с верху.
Как результат, ужасные люфты, сильное трение шпильки, в отдельных случаях дергание каретки оси Z на направляющих
( по данным вопросам получал от тебя разъяснения и советы). В ближайших планах изготовить станок Step-DiR с
большим размером рабочего поля.Контроллер L297+l298 готов и работает с Mach. Немного изучил ARTCAM, AUTOCAD,
Wiev Companio и т.п., но все равно испытываю сложности в подготовке DXF и G код файлов.





С уважением, Баталов Гани
г.Астана, Казахстан”