“
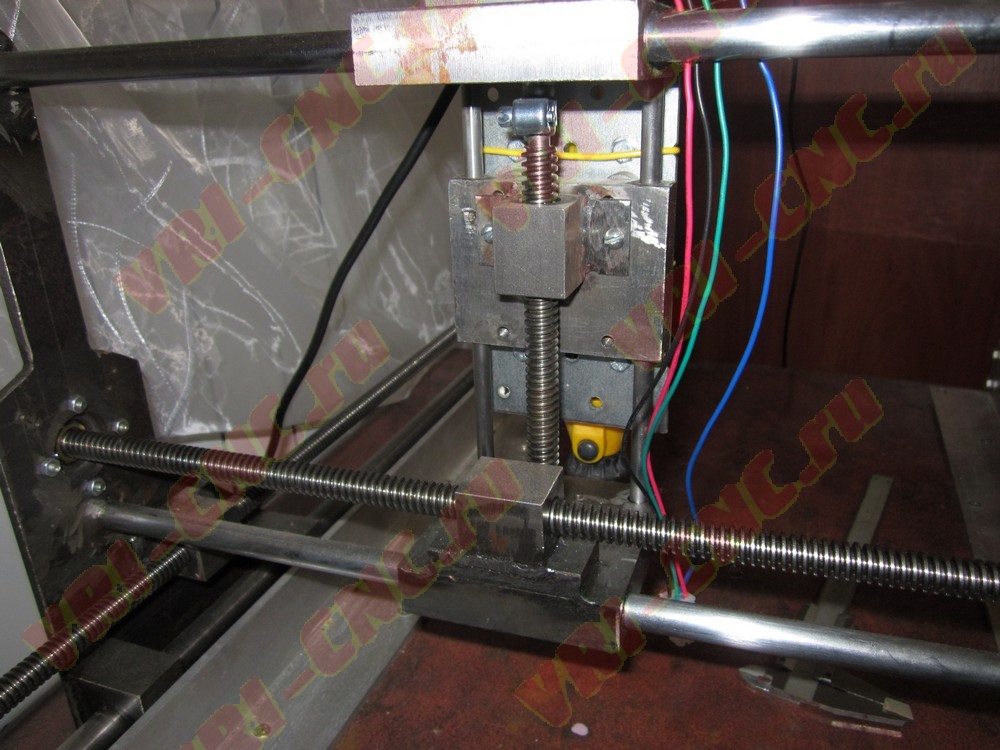
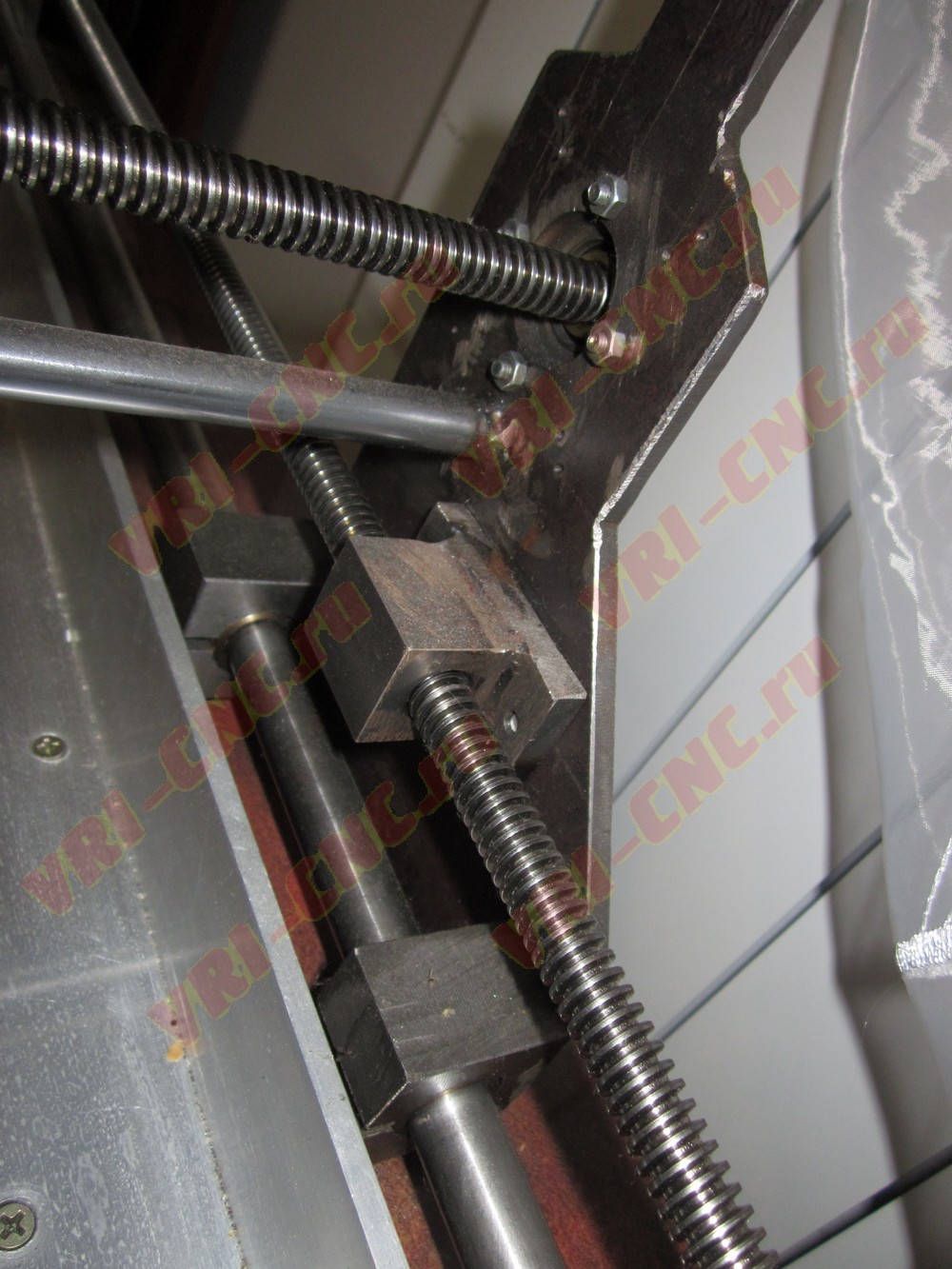
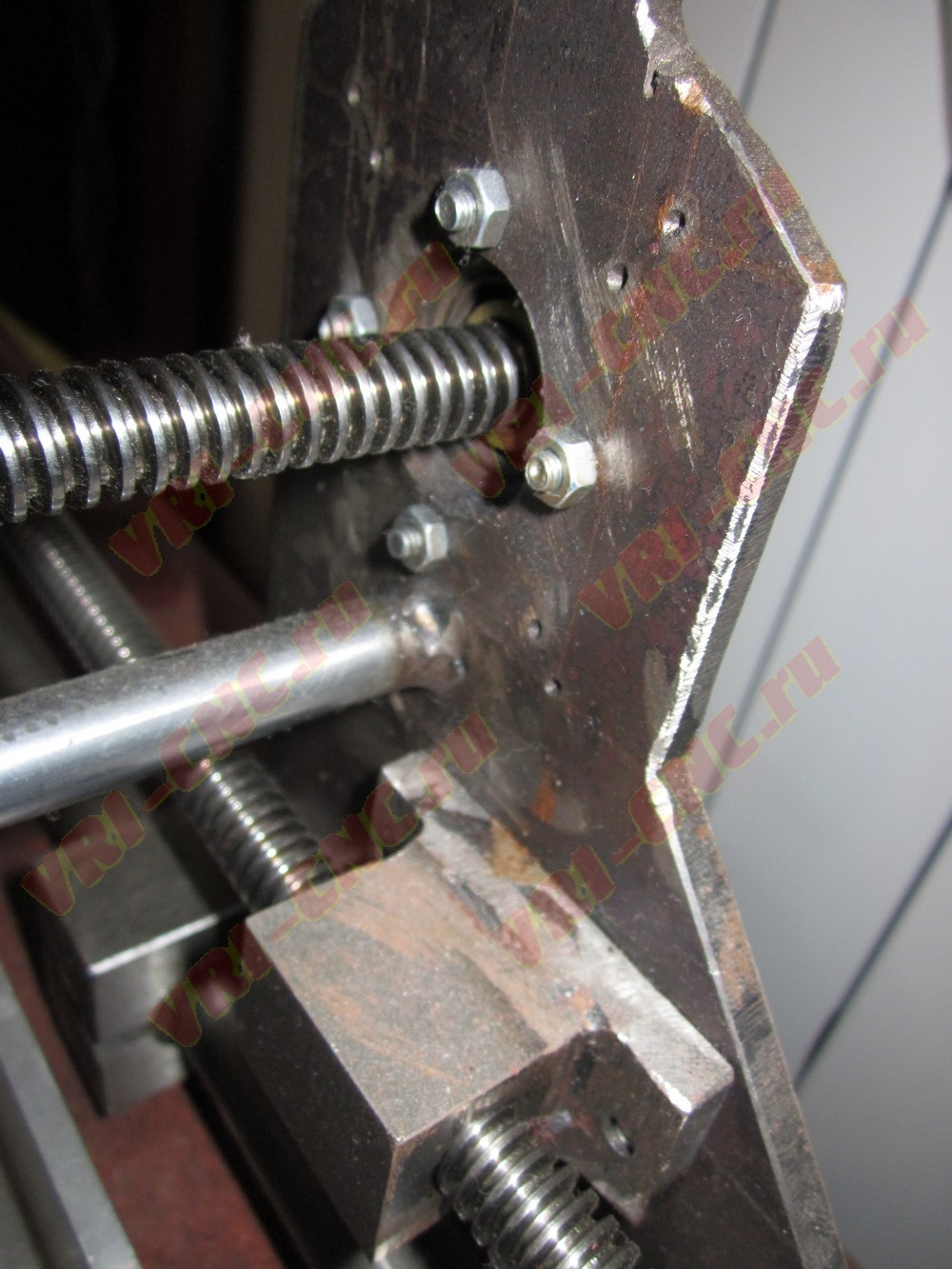
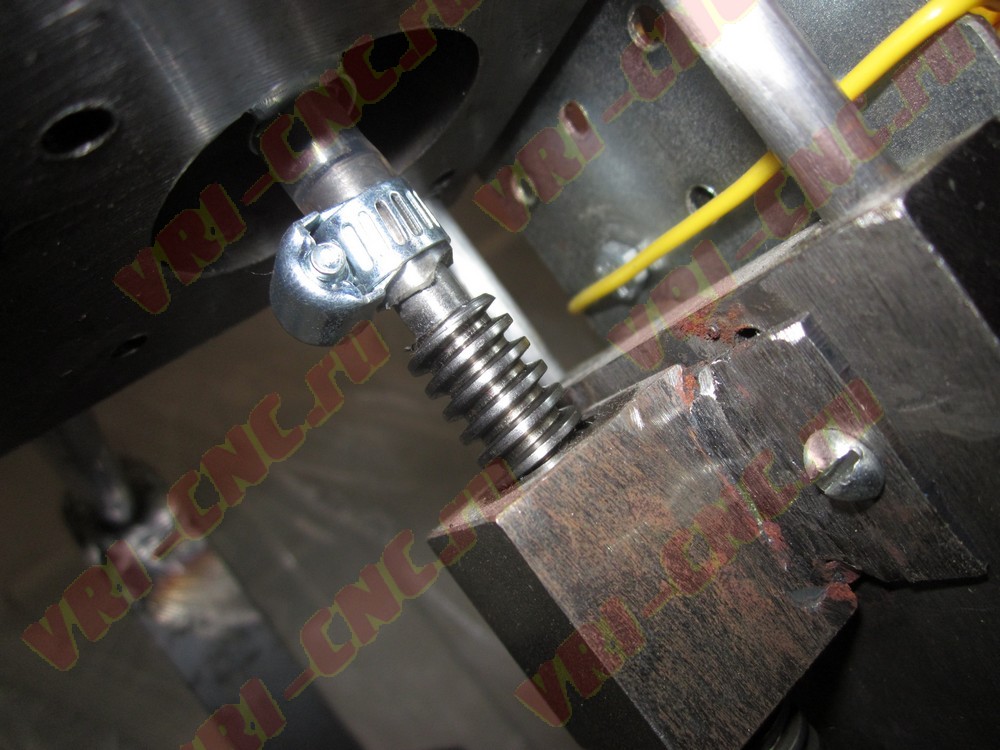
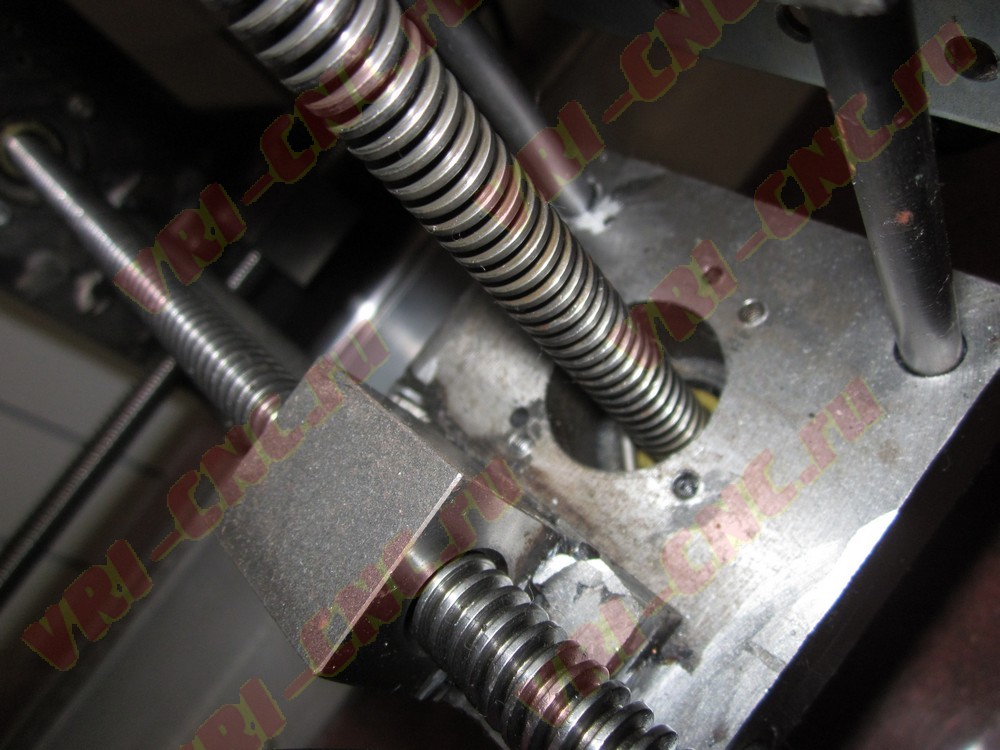
Вся механика из металла. (винты немецкие, направляющие – оси –
тоже фирмовые, бронзовые втулки точили).
“
“ __
__

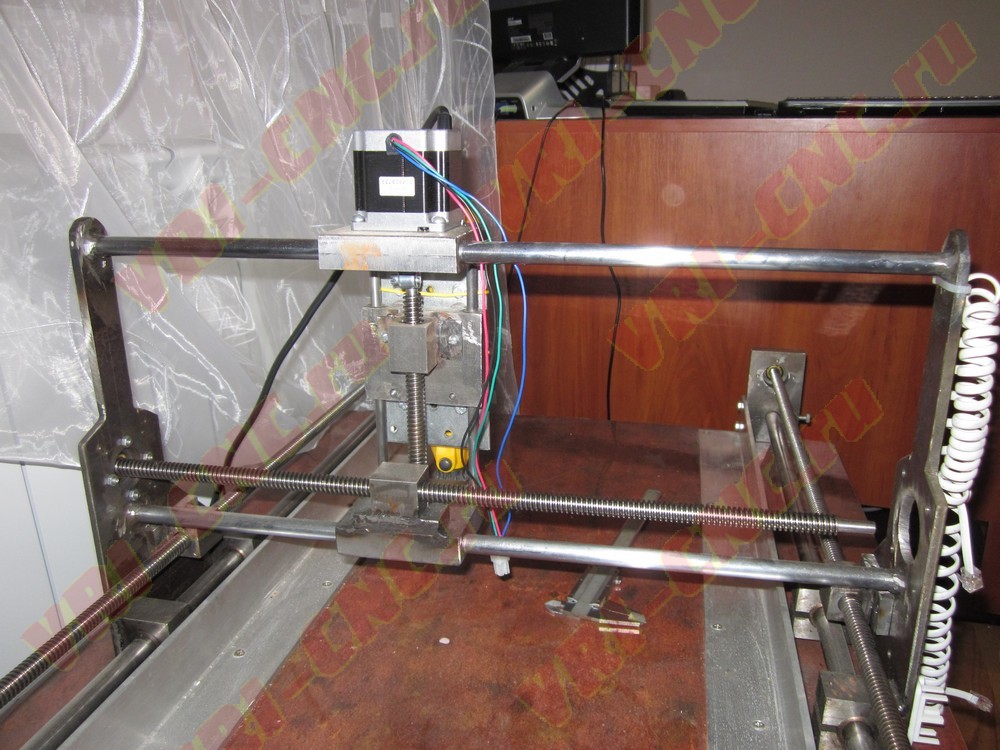
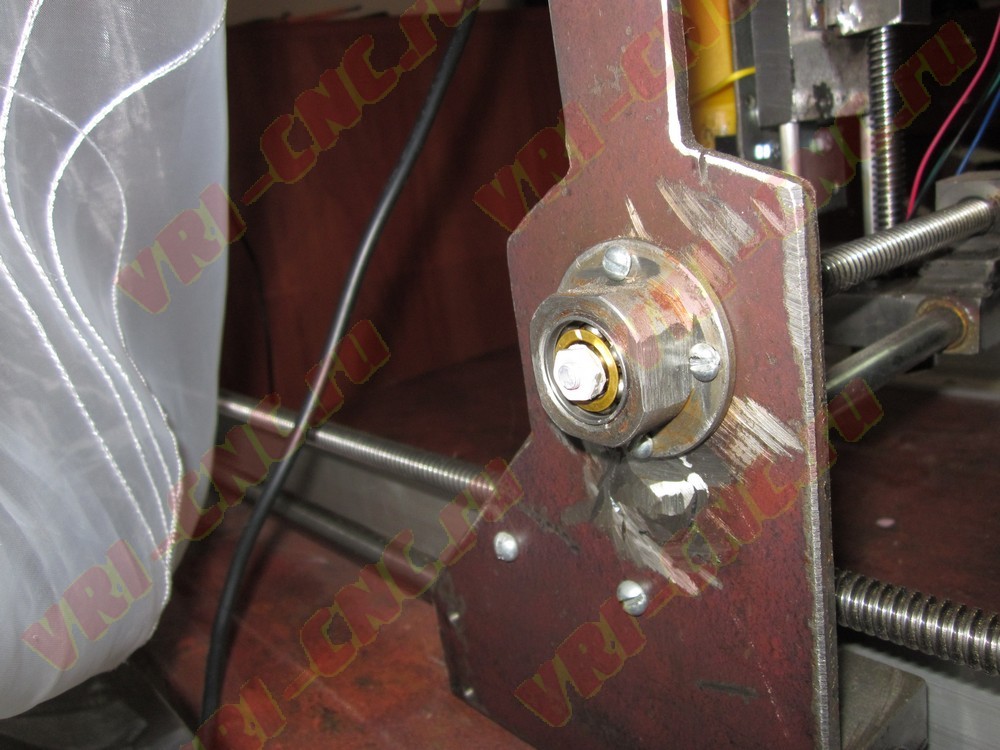
2. Механика станка практически полностью готова (осталось только кинематически связать два нижних вала оси х (у меня по оси х два винта и два двигателя). Станок размером приблизительно 1000х500 мм
3. Прикрепить шпиндель (использую “бур-машинку”, не знаю как правильно ее назвать фирмы Einhell)
 __
__

4. Вся механика из металла. (винты немецкие, направляющие – оси – тоже фирмовые, бронзовые втулки точили).
 __
__
 __
__
 __
__

Основание – толстая кухонная столешница, толщины не помню. Планирую под все дело изготовить передвижную тумбу где будет компьютер, монитор, станок и все другое (типа “все включено”).
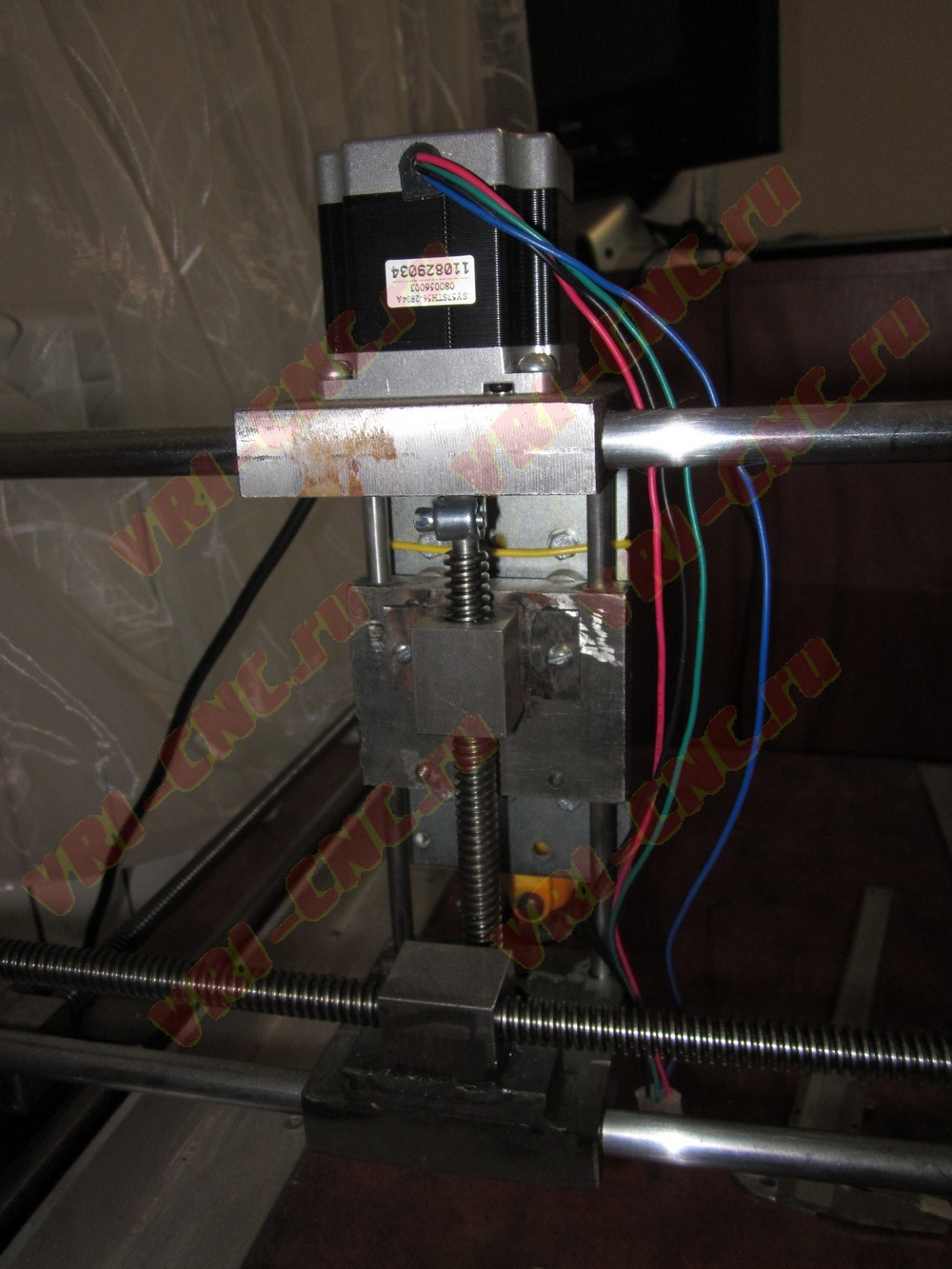
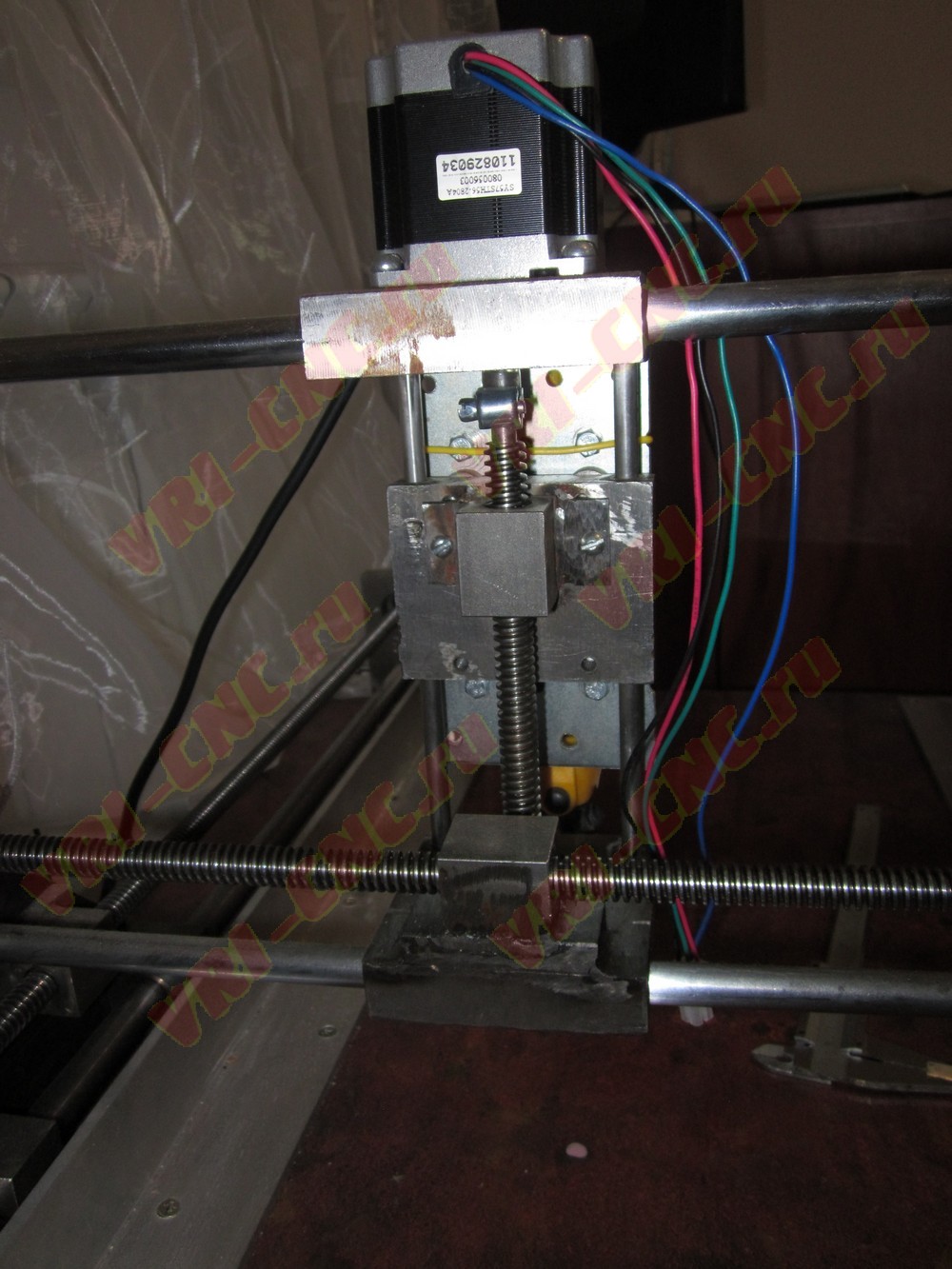
5. Так как использую электродвигатели биполярные с током 2.8А пришлось изготовить плату (из стабилизатором по току) для их управления и связи с Вашим аппаратным драйвером и программой. Аппаратный драйвер изготовил сам, вытравив плату. Но нужно еще инвертировать сигналы между аппаратным драйвером и платами управления двигателями а также поднять помехоустойчивость устройства.
 __
__

 __
__
6. На станке планирую изготавливать лицевые стороны пластмасовых корпусов приборов (не наклеек), для монтажа в них дисплеев, кнопок, индикаторов и др(я занимаюсь изготовлением автоматики в малых масштабах, планирую сайт smartcontrols.com.ua, но дисертация и другие обязаности убивают мое время). А также (так как я человек религиозный) хочу изготовить несколько икон для себя и своих друзей в подарок. Комерческих планов, пока не вижу. Зарабатываю только изготовлением автоматики в мелких масштабах.
7. Фото смогу выслать на выходных так как работаю не по месту жительства.
 __
__

 __
__
 __
__
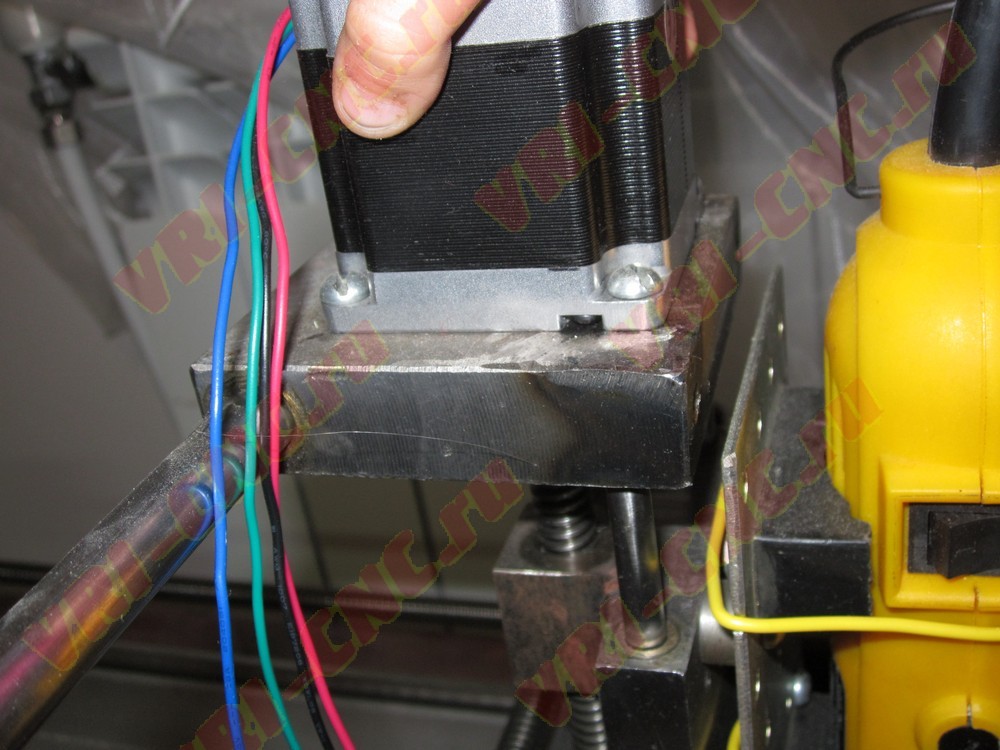
8. В данное время не могу протестировать двигатели в динамическом режиме, так как нет у меня Вашей программы. До этого я использовал униполярные двигатели но у них не хватило мощности (от принтеров). По этому и перешел на биполярные.
9. Еще забыл. Не установил еще концевые выключатели.
 __
__
 __
__


10. Хочу сделать подтяжку линий LPT-порта и фильтр на стробирующий сигнал.
“